

Автор: С.А. Беседин
Многие исследователи современной робототехники отмечают,
что широкое применение беспилотной техники – это характерная черта последнего десятилетия. Однако, данная техника была хорошо известна
и применялась еще со времен Второй Мировой войны (рисунок 1).

Рисунок 1 – Немецкая управляемая самоходная мина «Голиаф», кадр из обучающего фильма.
На текущий момент данная техника стала доступна не только для выполнения специальных задач, но и для автоматизации бизнес-процессов гражданских организаций.
В работе будут рассматриваться исключительно БпЛА.
Постановка задач исследования.
Современные БпЛА используются преимущественно в двух вариантах: летающая камера и летающий перевозчик грузов. Таким образом, главное достоинство рассматриваемых ЛА – отсутствие пилота, в рассматриваемых сценариях его использования практически отсутствует. Потому что каждым БпЛА, управляет как правило, один оператор. Конечно, преимущество в снижении вероятности нанесения вреда здоровью и повышении скорости выполнения задач сохраняется, но у рассматриваемой техники есть куда больший потенциал.
Беспилотники могут быть объединены в группы в рамках решения одной задачи. Это наглядно демонстрируется на различных «шоу дронов» где участвуют гражданские образцы, а к примеру в Иране, была разработана и протестирована система взаимодействия группы разнородных специализированых БпЛА Swarm, о которой нет достаточно полной информации. Однако отечетсвенных аналогов подобных решений по-прежнему нет.
Таким образом, объединение беспилотников в группы для решения одной задачи является перспективным направлением для исследования.
В работе будут рассматриваться условия и способы объединения БпЛА в группы.
Однако, очевидно, что не всегда достаточно просто объединить БпЛА в группы. Необходимо также разработать способы решения данными группами ситуационных задач исходя из обстановки. Для этого необходимо разработать способы управления конфигурациями группы БпЛА.
В основе такого способа должна быть заложена система сенсоров и иных источников информации для принятия решений. Также необходимы средства связи, обеспечивающие взаимодействие компонентов, средства хранения информации о ходе выполнения полетного задания, средства взаимодействия с оператором и многое другое. Одним словом, необходимо создание единого информационного пространства, в которое могут быть включены БпЛА различных типов, подходящие для выполнения поставленной задачи.
В работе будут рассматриваться подходы к созданию единого информационного пространства, а также промежуточные результаты, достигнутые в ходе проведенных исследований.
Также перспективным направлением для исследований является резервирование и импортозамещение способов определения геопозиции БпЛА. На текущий момент как в отечественных так и в зарубежных моделях доминирует применение системы GPS, которая при определенных обстоятельствах может оказаться недоступной. Авторами предлагается рассмотреть вопрос использования инерциальных систем навигации.
В представленной работе данный вопрос еще не исследован.
Решение задач исследования.
Для объединения беспилотников в группы, необходимо разработать схему взаимодействия группы с оператором. В ходе ранних исследований [1,2] было предложено использовать следующую схему взаимодействия (рисунок 2):
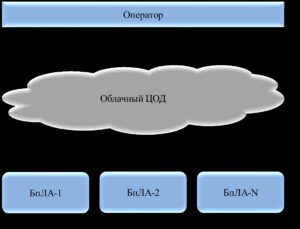
Рисунок 2 – Предлагаемая схема взаимодействия групп БпЛА с оператором
Согласно данной схемы, оператор управляет группой не напрямую,
а при помощи специального программного обеспечения (СПО), функционирующего в облачном центре обработки данных (ЦОД).
СПО решает следующие задачи:
- Обеспечение интерфейса взаимодействия оператора с группой;
- Хранение необходимых данных о районе выполнения задачи;
- Хранение информации о характеристиках каждого БпЛА
из группы; - Реализация системы поддержки принятия решений оператором;
- Реализация алгоритма распределения задач всем участникам группы;
- Реализация алгоритма построения оптимального маршрута
для отдельного БпЛА из группы с учетом характеристик; - Хранение информации о состоянии группы в ходе выполнения задачи;
- Хранение и (при необходимости) обработка собранной в ходе выполнения задачи информации.
СПО функционирует согласно следующему алгоритму (Рисунок 3):
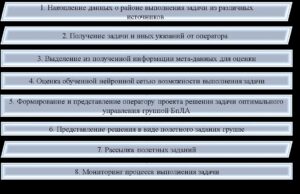
Рисунок 3 – Алгоритм функционирования СПО
Согласно данному алгоритму, на первом этапе происходит накопление (и обновление в режиме реального времени) данных
о районе выполнения задачи (погодные условия, данные
о препятствиях и иная влияющая на выполнение задачи информация). На втором этапе – происходит непосредственное получение задачи
от оператора (указание района и иных условий выполнения задачи). После чего собранные данные, при помощи специальных алгоритмов, преобразуются в мета-данные, пригодные для подачи на вход заранее обученной нейронной сети. Подход к обучению нейронной сети рассмотрен в ранних работах [3,4]. На четвертом этапе мета-данные обрабатываются при помощи указанных нейронных сетей. После получения результатов работы нейронной сети, на пятом этапе оператор получает проект решения задачи группой беспилотников. Он может дать сигнал на начало выполнения задачи, либо внести изменения в проект. После получения согласия оператора, на шестом этапе происходит формирование полетного задания каждому БпЛА из группы. На седьмом этапе происходит их рассылка. Далее СПО занимается мониторингом выполнения задачи группой – заново оценивает обстановку в реальном времени и решает задачу ситуационного планирования.
Рассматриваемая схема позволяет собирать всю информацию об обстановке и о состоянии группы в одном месте (облачный ЦОД)
а соответственно, позволяет решить задачу организации единого информационного пространства.
Для реализации модели разрабатываемого СПО, было решено разделить процесс разработки модели на модули, каждый из которых отвечает за отдельную задачу. В ходе проведенных исследований, была разработана программная модель, реализующая один из модулей СПО – «Модуль построения оптимального маршрута для отдельного БпЛА с учетом характеристик» (проходит регистрацию).
В основе модуля заложена модель рекуррентной нейронной сети (НС). Причина выбора именно такого выбора описана в одной из предыдущих работ [5]. В целях выбора конкретной модели НС на заранее подготовленном и очищенном наборе данных проведено тестирование, в котором задача оценки проходимости района выполнения задачи решалась при помощи моделей CNN, LSTM и GRU. Результат тестирования отображен на рисунке 4.
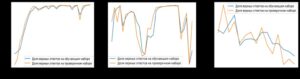
Рисунок 4 – Результаты тестирования, слева-направо: LSTM, GRU, CNN
По результатам тестирования, лучше всего показала себя модель LSTM с активационной функцией relu, достигнув 98% точности предсказаний.
Преимущество разрабатываемого модуля в том, что заложенная в него модель может учитывать ограничения при работе БпЛА на низких высотах, в том числе в помещениях, при наличии разнородных препятствий, которые трудно учесть оператору при прямом управлении беспилотником из-за ограниченности обзора и других факторов.
Разработанный модуль позволяет на основе данных об обстановке, о состоянии группы и полученного задания формировать карту проходимости района выполнения задачи [5]. Данная карта представляет собой последовательность нулей и единиц, где единицы – пригодные для прохождения участки (рисунок 4). После ее можно будет перенести на реальный план местности, подсветив труднопроходимые препятствия а также на ее основе построить маршруты оптимального облета района группой.
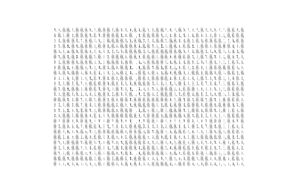
Рисунок 5 – Пример карты проходимости района выполнения задачи
Для решения задачи включения устаревших БпЛА в состав группы предложен способ интеграции нейросетевого регулятора совместно с классическими пид-регуляторами в быстрый контур управления БпЛА, конкретно – в блок стабилизации (рисунок 5).

Рисунок 6 – Быстрый контур в интеллектуальной системе управления БпЛА
В свою очередь, в стабилизационном блоке одним из вариантов интеграции нейросетевого регулятора является вариант, отображенный на рисунке 7.
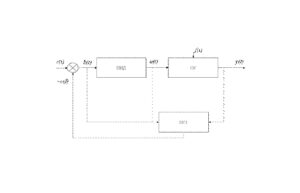 Рисунок 7 – Вариант интеграции нейросетевого регулятора в блок стабилизации БпЛА
Рисунок 7 – Вариант интеграции нейросетевого регулятора в блок стабилизации БпЛА
Таким образом, при распознании препятствий, обученная нейронная сеть, лежащая в основе блока НС1, будет получать на вход значение рекомендуемого автопилотом курса и высоты r(t) c поправкой w(l) (изначально равна нулю), управляющего воздействия u(t) сформированного ПИД-регулятором, а также результат воздействия на объект управления (ОУ) – y(t) и выдавать корректировку значения выданного автопилотом курса и высоты w(l).
После обхода препятствия, блок НС1 начнет выдавать корректировку для возвращения БпЛА на исходный курс. Таким образом, предлагается наделить беспилотники устаревшего парка возможностью обходить препятствия на пути следования.
Выводы: В результате проводимых с 2018 года исследований, разработана модель перспективной системы управления группами интеллектуальных БпЛА, программная модель одного из модулей СПО облачного ЦОД – части разработанной модели, методика обучения нейронной сети для оценки проходимости района выполнения задачи, а также способ наделения устаревших беспилотников способностью самостоятельно обходить препятствия, обнаруженные при помощи собственных сенсоров, для включения их в группы интеллектуальных БпЛА. Достигнутые результаты могут быть использованы при создании перспективных отечественных систем управления робототехническими комплексами как гражданского
так и специального назначения.
Литература:
- Беседин С.А., Иванов С.В. [и другие] – Решение задачи интеллектуального управления беспилотным летательным аппаратом
в условиях недетерминированной внешней среды – Сборник материалов XVII Всероссийской межведомственной научно-технической конференции «Информационная безопасность – актуальная проблема современности», (г. Геленджик, 2018 г.). - Беседин С.А., Иванов С.В., Королев И.Д. [и другие] – Интеллектуальная система поддержки принятия решений робототехническим комплексом в условиях недетерминированной внешней среды. — Сборник научных трудов международной научно-технической конференции, АПНИ, г. Белгород, 27.02.2019.
- Беседин С.А., Иванов С.В., Беленков Г.А. [и другие] – Применение нейронных сетей в системах поддержки принятия решения интеллектуальным беспилотным летательным аппаратом
в условиях недетерминированной внешней среды. — Сборник научных трудов международной научно-технической конференции, АПНИ,
г. Белгород, 30.01.2019. - Беседин С.А., Иванов С.В., Сыцевич М.Г., Тимофеев В.А.
[и другие] – Программа для исследования системы поддержки принятия решения беспи-лотным летательным аппаратом в усло-виях ограничений – Свидетельство о государственной регистрации программы для ЭВМ № 2019612226 от 04.02.2019. - Беседин С.А., Иванов С.В. – Гибридная нейросетевая система адаптивного управления группой беспилотных летательных аппаратов на основе ситуационного подхода в условиях неблагоприятных внешних воздействий – «Вопросы оборонной техники. Научно-технический журнал. Технические средства противодействия терроризму. Серия 16». Выпуск (155 — 156), с. 36-45.


